


步进电机驱动器 /
MAD420E 两相数字式步进电机驱动器
产品简介:
MAD420E型数字式低压步进电机驱动器,采用最新32位DSP技术,具备优秀的中低速性能,能够满足大多数小型设备的应用需要。采用内置微细分技术,即使在低细分条件下,也能够达到高细分的效果,中低速运行都很平稳,噪音极小。驱动器内部集成了参数自整定功能,能够针对不同电机自动生成最优运行参数,最大限度发挥电机的性能。
*本产品支持为大批量用户 OEM 或 ODM 订制服务

| ● MAD420E输入电压12~40VDC,电流有效值0.3~2.0A,适配20mm、28mm、35mm、39mm、42mm两相步进电机 | |
| ● 智能电流控制提高动态Q值,使电机发热大为降低; | ● 抗共振技术,轻松突破中速共振区,中高速特性良好; |
| ● 改进型PWM控制算法使电机及驱动器发热量更小; | ● 全流切换到半流无明显的噪音与振动; |
| ● 可驱动 4,6,8 线两相步进电机; | ● 光隔离差分信号输入; |
| ● 脉冲响应频率最高可达 200KHz; | ● 电流设定方便; |
| ● 具有过压、欠压、短路等保护功能; | ● 体积小巧,节省安装空间。低成本,经济实惠。 |
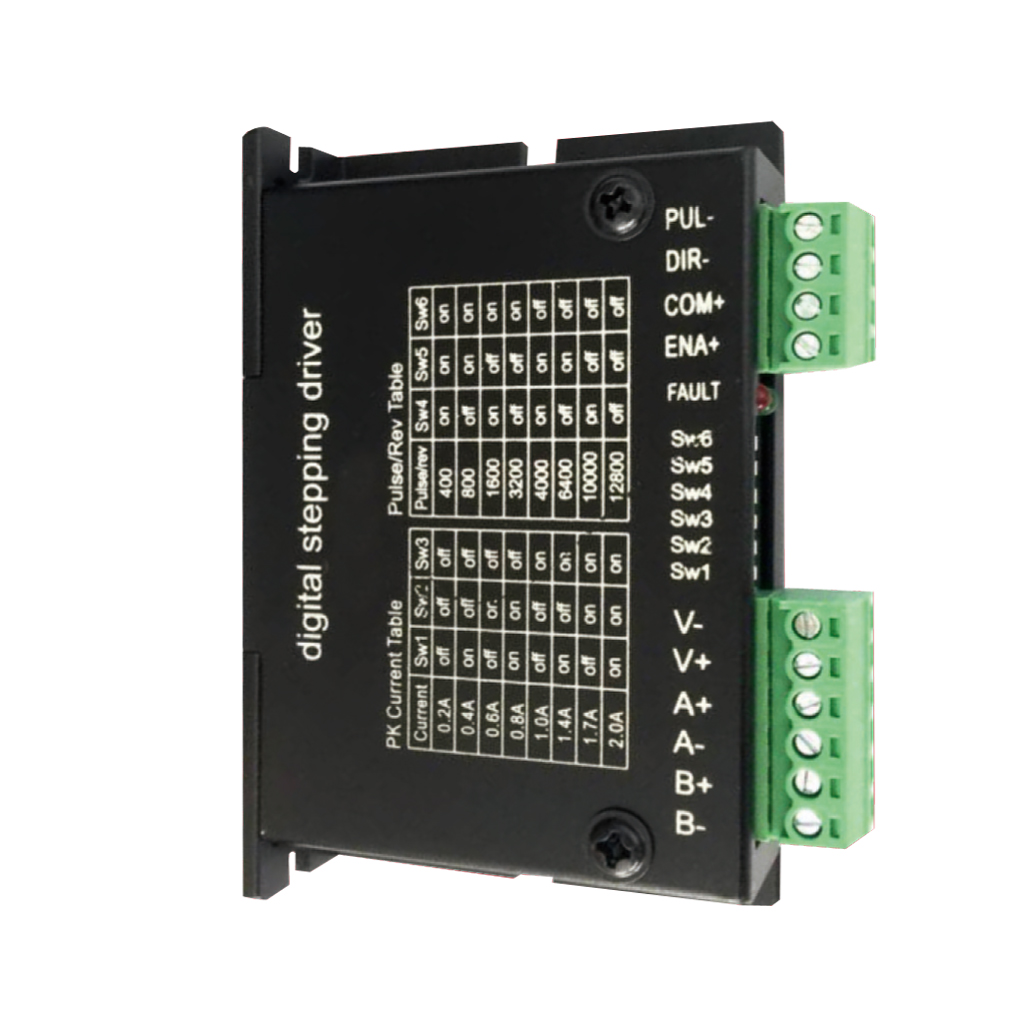
控制信号接口
|
名称
|
说明
|
| PUL- |
脉冲控制信号:脉冲上升沿有效;PUL-高电平时4~5V,低电平时 0~0.5V。为了可靠响应脉冲信号,脉冲宽度应大于 2μs。 如采用+12V 或+24V 时需串电阻。 |
| DIR- |
方向控制信号:为保证电机可靠换向,方向信号应先于脉冲信号至少 5μs 建立。电机的初始运行方向与电机的接线有关,互换任一相绕组 (如A+、A-交换)可以改变电机初始运行的方向,DIR-高电平时4~5V,低电平时0~0.5V。如采用+12V 或+24V 时需串电阻。 |
| COM+ | 公共端内部连接PUL+DIR+ENA+ |
| ENA- |
使能信号:此输入信号用于使能或禁止。ENA-接低电平时,驱动器将切断电机各相的电流使电机处于自由状态,此时步进脉冲不被响应。 当不需用此功能时,使能信号端悬空即可。 |
工作电流设定
|
current
|
SW1
|
SW2
|
SW3
|
|
0.2A
|
off
|
off
|
off
|
|
0.4A
|
on
|
off
|
off
|
|
0.6A
|
off
|
on
|
off
|
|
0.8A
|
on
|
on
|
off
|
|
1.0
|
off
|
off
|
on
|
|
1.4
|
on
|
off
|
on
|
|
1.7
|
off
|
on
|
on
|
|
2.0
|
on
|
on
|
on
|
微步细分设定
|
Pulse/Rev Table
|
SW4
|
SW5
|
SW6
|
|
400
|
on
|
on
|
on
|
|
800
|
off
|
on
|
on
|
|
1600
|
on
|
off
|
on
|
|
3200
|
off
|
off
|
on
|
|
4000
|
on
|
on
|
off
|
|
6400
|
off
|
on
|
off
|
|
10000
|
on
|
off
|
off
|
|
12800
|
off
|
off
|
off
|

● 配套电机:额定电流大于0.3A,小于2.0A的2相混合式步进电机及直线丝杆电机。适配20mm、25mm、28mm、35mm、42mm两相步进电机
● 供电电源:输入电源电压在DC:12V-40V之间都可以正常工作,电源电流应当是配套电机额定电流的1.6倍。
● 供电电源:输入电源电压在DC:12V-40V之间都可以正常工作,电源电流应当是配套电机额定电流的1.6倍。
适合各种中小型自动化设备和仪器,例如:雕刻机、剥线机、打标机、切割机、激光机、绘图仪、医疗设备、数控机床、自动装配设备、电子加工设备等。在用户期望低噪声、高速度的设备中应用效果特佳。
 《MAD420E 两相数字式步进驱动器》用户手册.PDF
《MAD420E 两相数字式步进驱动器》用户手册.PDF